Pada percobaan kali ini, input yang digunakan adalah jarak yang berasal dari sensor jarak.
Beberapa variabel yang digunakan sebagai berikut.
- Output
Output akan digunakan untuk mengontrol motor driver melalui PWM (pada Arduino Nano 10 bit - 0 sampai 255). Berikut ini nilai yang akan digunakan untuk percobaan kali ini.
- Lambat : 150 - 200
- Sedang : 175 - 225
- Cepat : 200 - 250
Langkah 1:
Buka Aplikasi Matlab
Langkah 2:
Buka toolbox fuzzy
> Ketikkan "fuzzy" pada Commad Window Matlab untuk membuka tool Fuzzy Logic Designer.
Langkah 3:
Tambahkan 3 input pada FIS
> Klik Edit - Add Variable - Input
Berikut ini hasilnya
Langkah 4:
Tambahkan 2 Output pada FIS
> Klik Edit - Add Variable - Output
Berikut ini hasilnya
Langkah 5:
Masukkan parameter Input
Ubah nama input menjadi:
Hasilnya seperti berikut ini
Parameter untuk input SKiri, SDepan, dan SKana dibuat sama. Berikut ini cara mengatur parameter pada input SKiri
> Klik Blok SKiri
Berikut tampilan untuk pengaturan parameter input
Parameter yang diatur adalah sebagai berikut.
Berikut Parameter-parameter yang akan digunakan:
Range : [0 80]
Untuk mf1:
- Name : Dekat
- Params : [0 20 40]
Untuk mf2:
- Name : Sedang
- Params : [20 40 60]
Untuk mf3:
- Name : Jauh
- Params : [40 60 80]
Hasilnya adalah sebagai berikut.
Langkah 6:
Masukkan parameter Output
Ubah nama output menjadi:
Hasilnya seperti berikut ini
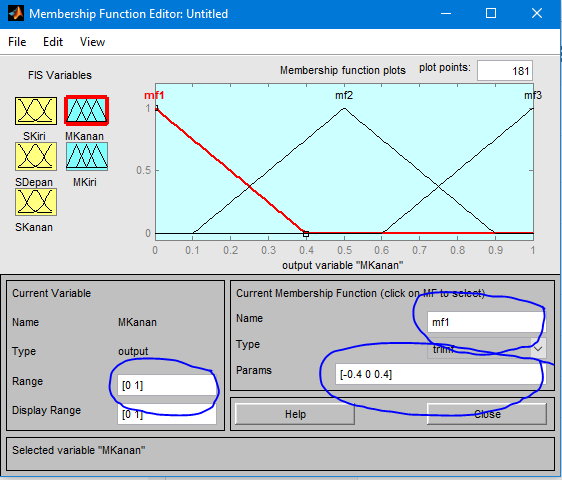
Parameter untuk output MKanan dan MKiri dibuat sama. Berikut ini cara mengatur parameter pada output MKanan
Berikut tampilan untuk pengaturan parameter input
Parameter yang diatur adalah sebagai berikut.
Berikut Parameter-parameter yang akan digunakan:
Range : [150 250]
Untuk mf1:
- Name : Lambat
- Params : [150 175 200]
Untuk mf2:
- Name : Sedang
- Params : [175 200 225]
Untuk mf3:
- Name : Cepat
- Params : [200 225 250]
Hasilnya adalah sebagai berikut.
Langkah 7:
Masukkan Aturan-aturan
> Klik blok Rule maka akan muncul Rule Editor seperti berikut
Berikut ini hasil mapping dari Kontroler Fuzzy yang telah dibuat